

Researchers studying bumblebees were previously unable to track the insect’s movement outside the nest without the use of prohibitively expensive harmonic radar tracking systems. The first ECT grant supported the development of an initial version of the tracking system. This second grant has supported a series of experiments to explore how the tracking system can help us study a variety of insect behaviours. We also developed several novel improvements to the original system. The project is ongoing and we have several more experiments in 2023/24. I will explain a few of the pilot experiments and methods below.
A key problem we found in the previous version of the system was the capabilities of the algorithm itself. It is worth emphasising that the hardware provided by this grant allowed us to collect the data required to refine and develop the algorithm. The improvements to the algorithm enabled the following research.
Initial Demonstration of Tracking System
We conducted a series of field trails to explore foraging behaviour and to demonstrate the system operating in-field. The two key demonstration experiments were:
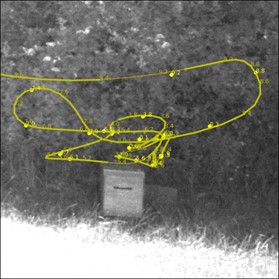
1) Recording the foraging over several hours of bees and which flowers they visit:

 The paths of bees detected using the system. Foraging area extended from 8 m to 15 m from the tracking system.
The paths of bees detected using the system. Foraging area extended from 8 m to 15 m from the tracking system.
2). A simple floral preference experiment: Confirming that individual bees have specific floral preferences.
These experiments and others, the methods and more details are available in Smith et al. (2021).
3d Learning Flights
In the few seconds after leaving the nest, bees conduct a series of looping flights, quickly learning where the nest is, then can leave the area, looking for forage and return later, quickly returning to the nest. These flights are really interesting to researchers, but are currently impossible to record at the ‘meso-scale’ (2m-30m) around the nest.
We built multiple tracking systems using the ECT grant, and used these to reconstruct the 3d flight path of bumblebees.
![]()
![]()

The new tracking system. An example 3d learning flight from the nest.
Other experiments include:
1) Pollinator responses to plant metabolites. In collaboration with Stuart Campbell we explored which inflorescences on which plants the bees preferred.
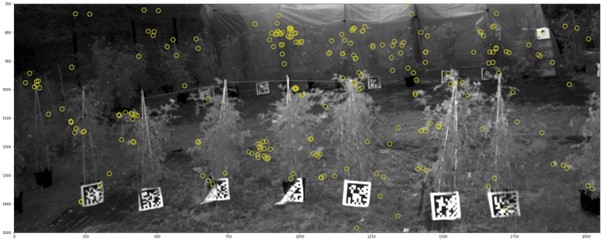

Figure shows where the bees foraged, the plants were each labelled with QR codes
2) Unique tags and orientation. We developed an approach to distinguish tags by adding coloured filters to the tags. This allowed us to track individuals (previously different tags were indistinguishable). We extended this by making a multicoloured tag which allowed us to infer the facing direction of the bee from the reflected colour.
3) Dragonflies and moths. I’ve been working with collaborators to track other animals using the system (dragonflies, to explore their territories over water; and moths, looking at the impact of artificial light on their flight paths).
4) Bluetooth. The funding has allowed us to start the development of a novel tracking system using bluetooth receivers on the insect. This should allow landscape scale tracking at low cost.
The research using the ECT funded tracking systems is ongoing. We will be exploring solitary bees, learning flights and foraging scale using this equipment over the next 12-24 months.
Dr Michael Smith, University of Sheffield.
Ref.: ECTA_20210311
Completed: 2023
References
Smith, M. T.; Livingstone, M. and Comont, R. "A method for low‐cost, low‐impact insect tracking using retroreflective tags." Methods in Ecology and Evolution 12.11 (2021): 2184-2195.